For the past couple years I’ve had a vision of a robotic tentacle or elephant trunk. So, when I was having a particularly frustrating night of working on my thesis, I decided to spend a few hours on the tentacle for a mental break.

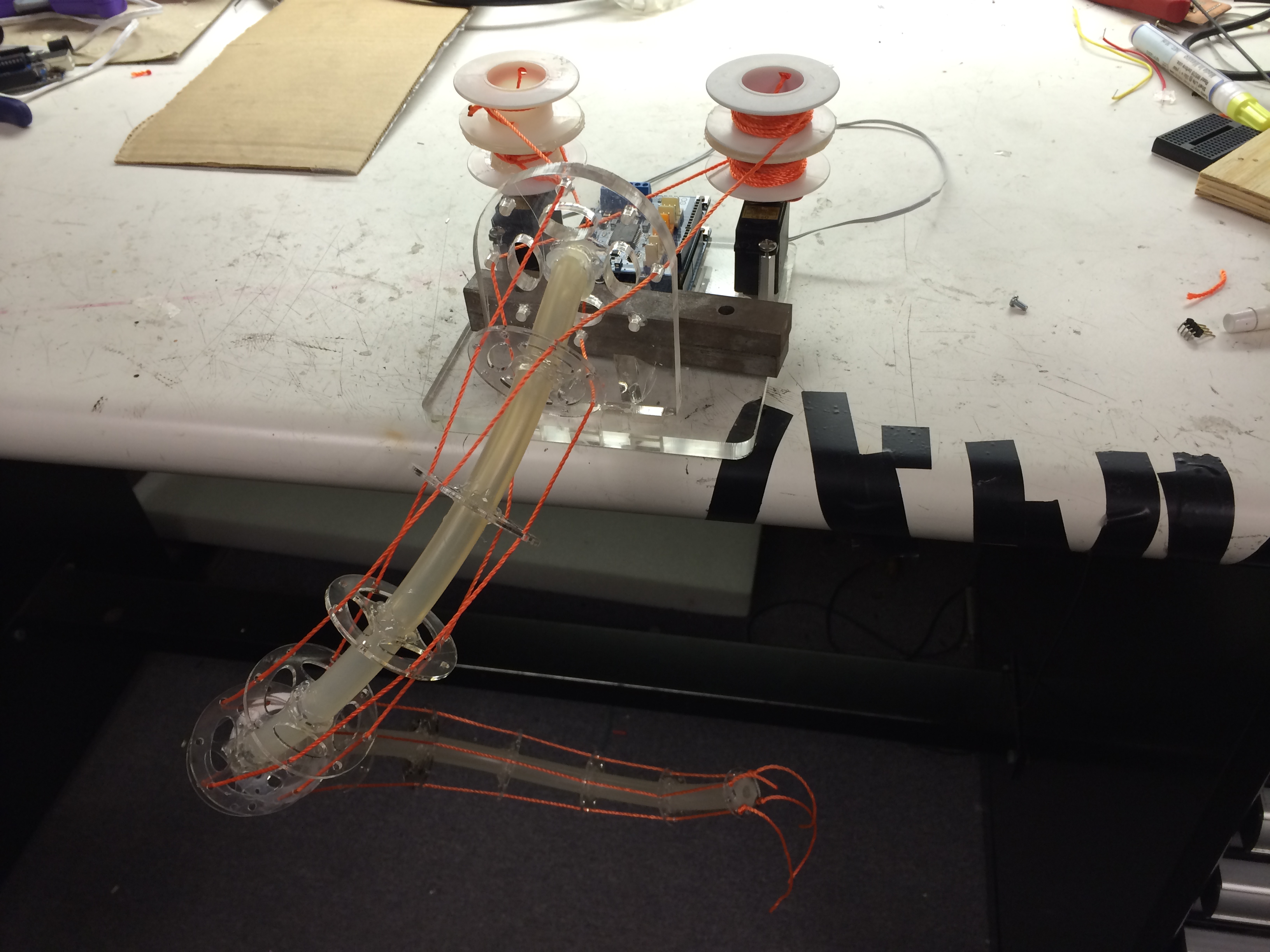
I started by laser cutting a base out of 8.5mm plexiglass. The upright piece has grooves that fit into slots in the base and are secured with a little bit of hot glue. Two motors made from converted servos are bolted to the base as well as an Arduino Uno and Motor Shield. I plan to take the arduino out of the final product but it’s just so easy to use for prototyping that it’s kinda hard to find a reason not to.
The center of the tentacle is made from a flexible piece of tubing. I was looking for something that could bend without kinking and was light enough not to weight the whole thing down.
The links are positioned every two inches along the tubing and secured with hot glue. The links are made of 2.5mm plexiglass cut on the same laser cutter. As much material as possible was removed from the link to reduce weight. The links are secured to the tubing with more hot glue. Plexiglass and hot glue: that’s how we doing things around here.

For the movement, I ran nylon line down the top, bottom, left, and right holes in each link and ran them back to the motors. Each motor has two spindles mounted on the top with the line wound in different directions. As the motor turns, it pulls the string in one direction while allowing slack in the opposite one.
Overall, I’m pretty happy with this first attempt. It has positive control of the tentacle and has shown me that this method is a practical solution. However, it has some problems. The tubing I’m using for the central part of the tentacle has a bit of natural bend in it and doesn’t have very much torsional stability. This causes it to curl unnaturally. The photo below shows the trunk told to bend only upward but it has twisted and bent around. In the future I’ll be looking for something with a little more torsional stability.