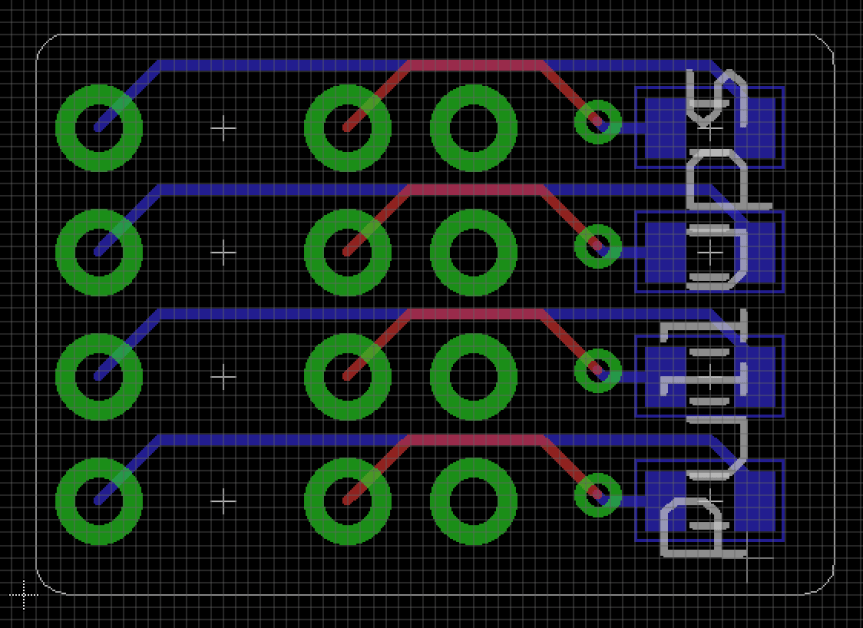
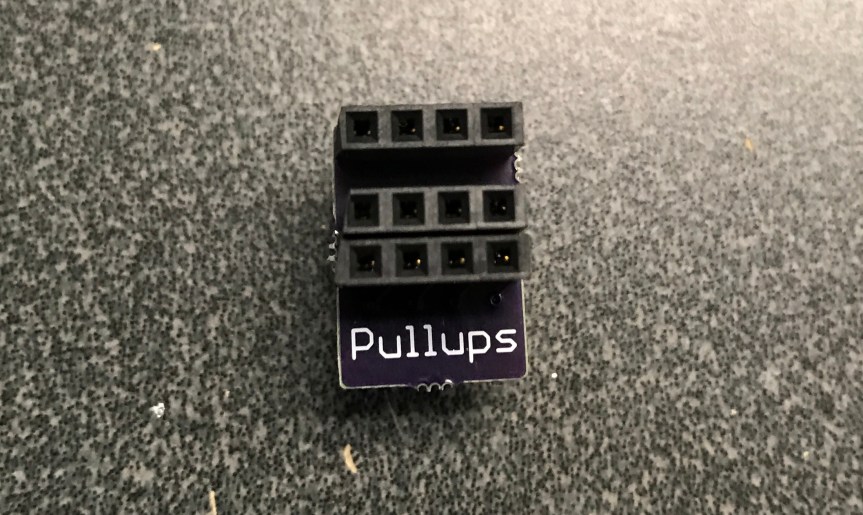
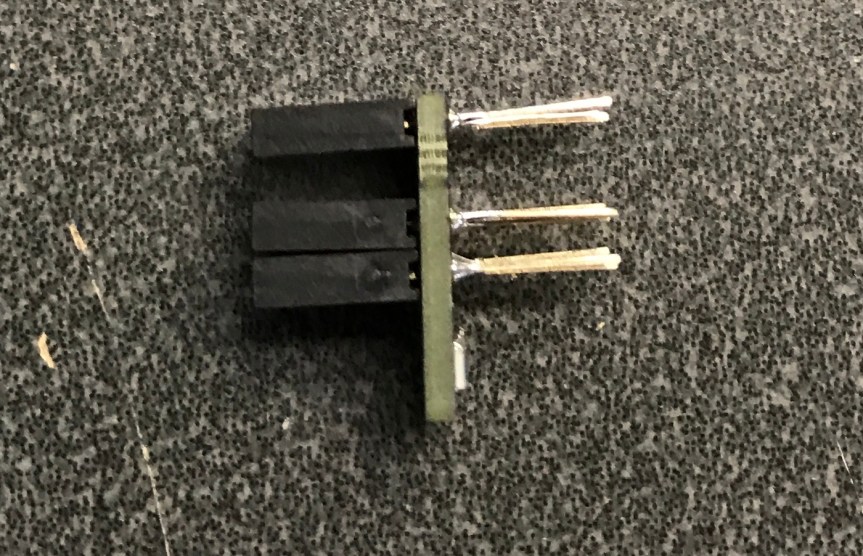
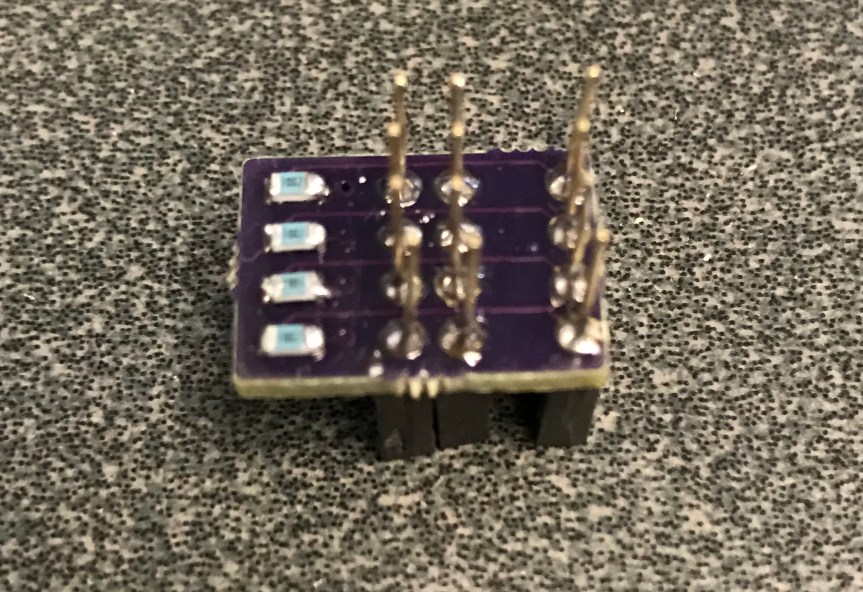
We’re using the Wallaby from KIPR in my robotics class this semester. I’d been told at the beginning of the semester that the pull-up resistors on the Wallaby weren’t working so many of our old bump sensors would not work. So, I made this quick little adapter board to add pull-up resistors myself. The pins are female headers that are extra long so that they can be plugged in directly without any other pins (I found them by searching for stacking headers). I decided to only do four pins so that the other slots could be left open for other sensors that might not want a pull-up resistor. If I did this again, I’d do only three or six slots since stacking headers are easy to find in those lengths; I used 10 pin headers cut in half and sanded flat. So there you go. Not too interesting but documented for anybody else who may want it.
EDIT: The pull-up adapter is working perfectly. However, it seems that many of the sensors are working fine without them as well. Perhaps it’s a coincidence? Or maybe that firmware update I did last week fixed the internal pull-ups? We may never know…