

My robotics class is in a unique situation in that we are using the Wallaby from KIPR as a robotics controller with the original version 1 Create from iRobot. Almost everybody else has moved on to the Create 2 but I’m not a fan and we’ve still got a lot of Create 1s around so we’ll use them until they die. But this leaves us in an interesting position getting them to communicate. This isn’t a super exciting post but maybe it’ll help somebody.
The previous robot controller from KIPR (the LINK) had a serial port (RX, GND, TX) but the Wallaby only has USB ports. We could use the Create 2 cable but because the location of the port changed, it would mean the cable would hang over the edge of the Create and almost certainly get damaged (these kids are fucking careless with these things). Also, the cables were like $40 – sheesh! Instead, I made my own for about $12 and they are far less likely to get damaged.
I used this cord from Sparkfun which has a built in FTDI chip to convert between the USB of the Wallaby and the TTL level serial of the Create. Here are the dsub connectors I ordered.

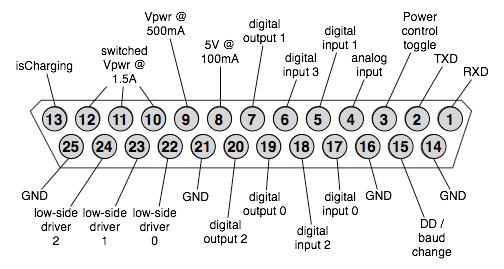
Below is the pinout for the Dsub connector on the Create. The only ones we really care about here are pin 14 (GND), pin 1 (RX), and pin 2 (TX). The orange wire from the cable should be connected to RX, the yellow wire should be connected to TX, and the black wire should be connected to GND. I just soldered the wires directly to the pins but you could also crimp pins on the wires and use a dsub connector that accepts them.
And finally, apply a liberal amount of hot glue to insulate the wires and the other pins. The hot glue also serves as strain relief for the connection.


Ignore the crappy soldering on that last one. It was done by a ta and is currently in the rework bin.
